IntelligentCarpet: Inferring 3D Human Pose from Tactile Signals
Publication
CVPR
Authors
Yiyue Luo, Yunzhu Li, Michael Foshey, Wan Shou, Pratyusha Sharma, Tomás Palacios, Antonio Torralba, Wojciech Matusik
Abstract
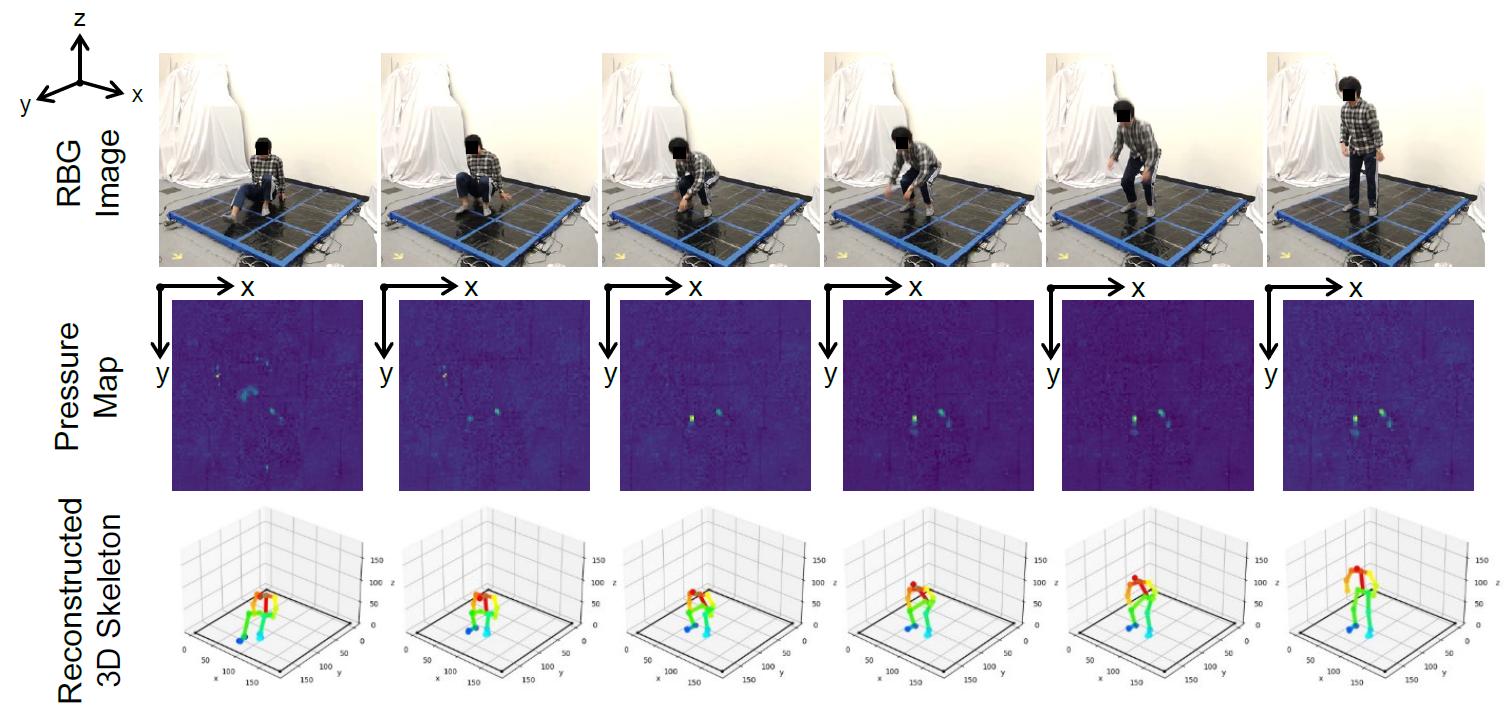
Daily human activities, e.g., locomotion, exercises, and resting, are heavily guided by the tactile interactions between human and the ground. In this work, leveraging such tactile interactions, we propose a 3D human pose estimation approach using the pressure maps recorded by a tactile carpet as input. We build a low-cost, high-density, large-scale intelligent carpet, which enables the real-time recordings of human-floor tactile interactions in a seamless manner. We collect a synchronized tactile and visual dataset on various human activities. Employing state-of-the-art camera-based pose estimation model as supervision, we design and implement a deep neural network model to infer 3D human poses using only the tactile information. Our pipeline can be further scaled up to multi-person pose estimation. We evaluate our system and demonstrate its potential applications in diverse fields.