Learning to Fly: Computational Controller Design for Hybrid UAVs with Reinforcement Learning
Publication
SIGGRAPH
Authors
Jie Xu, Tao Du, Michael Foshey, Beichen Li, Bo Zhu, Adriana Schulz, Wojciech Matusik
Abstract
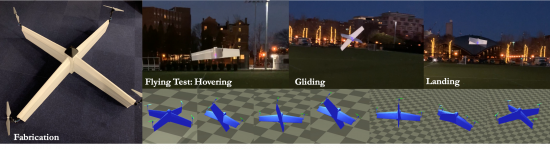
Hybrid unmanned aerial vehicles (UAV) combine advantages of multicopters and fixed-wing planes: vertical take-off, landing, and low energy use. However, hybrid UAVs are rarely used because controller design is challenging due to its complex, mixed dynamics. In this paper, we propose a method to automate this design process by training a mode-free, model-agnostic neural network controller for hybrid UAVs. We present a neural network controller design with a novel error convolution input trained by reinforcement learning. Our controller exhibits two key features: First, it does not distinguish among flying modes, and the same controller structure can be used for copters with various dynamics. Second, our controller works for real models without any additional parameter tuning process, closing the gap between virtual simulation and real fabrication. We demonstrate the efficacy of the proposed controller both in simulation and in our custom-built hybrid UAVs. The experiments show that the controller is robust to exploit the complex dynamics when both rotors and wings are active in flight tests.